A Research project aimed at developing Biped walking on a 24 DOF Humanoid Robot.
The project was conducted in 2018 at KLE Technological University, Hubli, India. Humanoid bipedal walking has become one of the most important research topics in the present trend. Bipedal walking is most superior when compared to most of the other types of locomotion. This is due to flexible mobility which is not present in other robots such as multi-logged and wheeled robots.
Legged motion has significant advantages over traditional locomotion techniques. Research and development on it have been constantly improving over the last couple of decades. Though there are numerous techniques in developing legged biped motion, none of them is fully satisfactory. The main aspects of legged motion are active balancing, smooth pattern generation and control. These play an important role in legged motion and there are numerous techniques developed to achieve it. The research that is done in this project is to implement model-based design methodology in developing ZMP stability algorithm. The main area that is been concentrated in the implementation of hardware-in-loop (HIL) simulation using an xPC - target computer. See the Publication to know more details
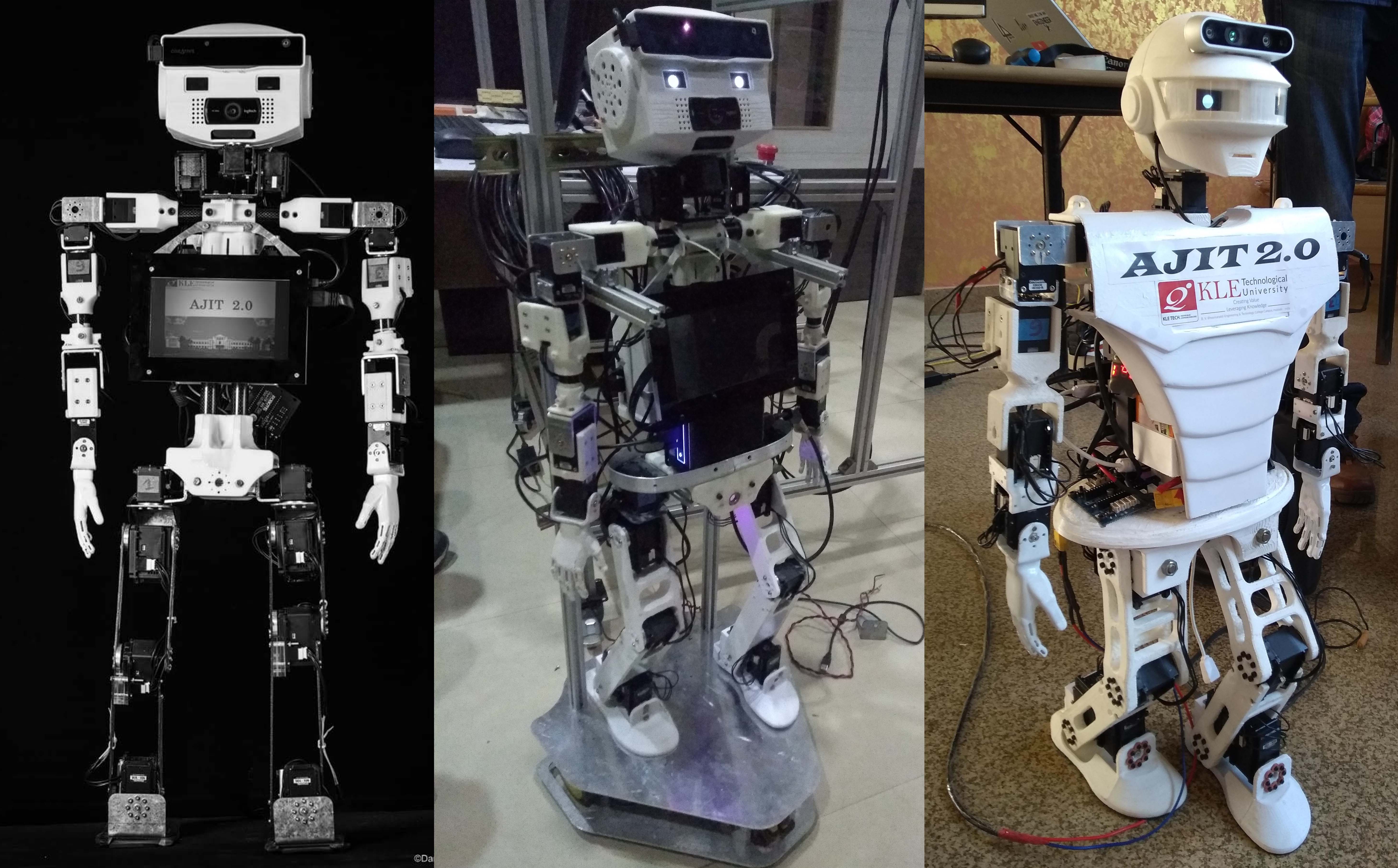
Experiments of development
Multiple versions of the biped platform were developed as shown in the figure above. The experiments were done by initially modifying the trajectory parameters and later by kinematic control.